
SUBA na Física...
na LEE, no IST, no Taguspark
No 1º semestre do 1º ano da LEE, os alunos tomam contacto com uma experiência laboratorial criativa, integrada na disciplina de Sistemas Digitais, sob a forma de TROFÉU SUBA, uma competição saudável e criativa entre os alunos.
No 2º semestre do 1º ano da LEE, os alunos tomam contacto com uma experiência integradora de conhecimentos na área da Física, designada por SUBÓDROMO, que terá, na sua formação, um valor acrescentado excepcional. Essa experiência foi criada e realizada pela coordenação da LEE (Prof. Moisés Piedade), em colaboração com o Prof. Paulo Freitas, do Departamento de Física do IST, tendo o apoio do Departamento de Engenharia Electrotécnica e Computadores do IST.
O SUBÓDROMO será documentado e divulgado na "Internet" e serão dados detalhes de construção que tornam fácil reproduzir a experiência, pelo menos nas versões mais básicas, por alunos de qualquer escola do ensino secundário ou superior. Algumas das experiências mais avançadas que vão ser realizadas por alunos da LEE podem, futuramente, ser transpostas para outras licenciaturas do IST.
|
Experiências de Física no Subódromo |
||||
| 2003-2004 | Prof. Paulo Freitas | 1ºs ensaios do SUBA no Subódromo | Planeamento de exp. de rolos no Subódromo | |
| 2004-2005 | Prof. Pedro Abreu | SUBA descendo no Subódromo | Rolando no Subódromo | |
| 2005-2006 | ||||
| 2006-2007 | ||||
MODELO DINÂMICO DO SUBA NO SUBÓDROMO?
As forças que condicionam o movimento do SUBA, com massa m, na rampa inclinada de um ângulo a, são:
Fpl = m. g. sen(a) - força longitudinal devida ao peso do carro com massa m;
Fmr - Força motora nas rodas com raio rr e velocidade de rotação nr;
Fi - Força de inércia = m . d2x/dt2
Fa - Força de atrito devida ao rolamento, ao atrito aerodinâmico e ao atrito electrodinâmico, podem ser de vários tipos: constantes, porporcionais à velocidade do carro ou ao seu quadrado.
Equações do Movimento
As soluções desta equação diferencial podem ser de vários tipos, resultantes de várias aproximações, consoante sejam, ou não, significativos os vários tipos de atrito. A força de atrito aerodinâmico pode ser desprezável (é proporcional ao quadrado da velocidade do SUBA), já que as velocidades são baixas, inferiores a 60 km/h.
Potência nas Rodas
Com a força motora a variar no tempo a potência mecânica nas rodas, que é necessária é:

Depois de se entrar num regime uniforme, com velocidade constante, tem-se:
Em que rcx é a relação mecânica da caixa de velocidades (1/16 ou 1/10,2) e n é o a velocidade de rotação do motor eléctrico em r.p.s.
Da potência eléctrica Pe, consumida pelo motor eléctrico, só parte, Pm é convertida em potência mecânica (depende do rendimento de conversão electromecânico do motor, he), e desta Pm só parte chega às rodas Pmr , devido aos vários tipos de perdas no sistema de transmissão e de tracção mecânica, que são afectadas pelo rendimento mecânico do sistema hm.
Pmr = hm . Pm = hm . he Pe
A)- Experiências "SUBA DESCENDO E SUBINDO" EXPERIÊNCIAS "SUBA DESCENDO E SUBINDO" NA RAMPA As experiências mecânicas são classificadas em dois tipos: I- SUBA DESCENDO e II- SUBA SUBINDO. SUBA DESCENDO: Tem como objectivo fazer a caracterização experimental do movimento de descida livre do SUBA através de várias amostragens da sua posição e para várias inclinações da pista. A modelação física e analítica do movimento do SUBA é feita num computador pessoal e permite, em todas as experiências, comparar os resultados experimentais com as previsões teóricas. SUBA SUBINDO: Tem como objectivo fazer a caracterização experimental do movimento de subida do SUBA na sua configuração completa e com o motor de tracção alimentado por uma fonte de tensão ajustável (obtida à custa de uma fonte de tensão contínua com modulação digital, Pulse Width Modulation, PWM, constante que já é conhecida dos alunos da LEE, ver trofeu SUBA03-I, realizado na disciplina de Sistemas Digitais no 1º ano, 1º semestre). I- SUBA DESCENDO E1- SUBA PARADO Medição dos coeficientes de atrito estático do SUBA na pista, com diferentes tipos de pneus (borracha, alumínio e teflon, etc.) e várias inclinações de pista. E2- SUBA DESCENDO Ensaio de descida do SUBA na sua configuração completa, com os motores desligados. E3- SUBA DESCENDO Ensaio de descida do SUBA com o motor de tracção de corrente contínua retirado (sem atrito electrodinâmico), mas com o peso compensado. E4- SUBA DESCENDO Ensaio de descida do SUBA com atrito mínimo (o motor de tracção, a caixa de velocidades e o diferencial são retirados e o peso é compensado. E5- SUBA DESCENDO SUBA desce com a travagem electromagnética accionada. O motor de tracção é posto a funcionar como gerador eléctrico (dínamo). A energia eléctrica assim obtida é convertida em luz ou em calor num conjunto de cargas resistivas configuráveis digitalmente. Faz-se uma modelação sumária do atrito electrodinâmico equivalente em termos mecânicos. E6- SUBA DESCENDO SUBA desce com o sistema de radio-telemetria digital instalado a bordo. As acelerações tridimensionais (ax, ay, az) são transmitidas para um PC onde são escritas numa folha de EXCEL. O aluno compara as acelerações obtidas com as que obtém através do sistema de sensores de posição situados ao longo da pista e com as acelerações previstas pelo modelo cinemático do SUBA. E7- SUBA DESCENDO COM DOPPLER Os altifalantes do SUBA são alimentados por um dos sinais digitais que está disponível no sub-chassis esquerdo. Através de um microfone de áudio colocado sobre a ponte adquire-se o som produzido pelo SUBA e mede-se a sua frequência. O SUBA inicia a descida e devido ao efeito Doppler o som recebido pelo microfone aumenta de frequência, proporcionalmente à relação entre a velocidade do SUBA e a velocidade de propagação do som na atmosfera. Com esta medida pode calcular-se a velocidade de descida. E8- SUBA NO RADAR O movimento do SUBA é vigiado por um RADAR de impulsos por ultra-sons colocado sobre a ponte do SUBÓDROMO, que mede constantemente a posição do SUBA. Os alunos estudam o princípio de funcionamento do RADAR e verificam o seu funcionamento. II- SUBA SUBINDO E9- SUBA PATINANDO Determinação dos limites de aderência (sem patinagem das rodas). Para um dado valor de d ajusta-se a inclinação da pista até o SUBA deixar de patinar. E10- SUBA ARRANCANDO Determinação do binário de arranque do motor eléctrico de tracção. Para uma dada inclinação da pista ajusta-se a intensidade da corrente eléctrica (através do factor no motor de tracção até este equilibrar a componente tangencial da força da gravidade, mantendo o SUBA parado. Podem traçar-se gráficos de binário de arranque em função da corrente média no motor de tracção para as duas posições da caixa de velocidades. E11- SUBA SUBINDO Com uma dada modulação da tensão de alimentação do motor de tracção e uma dada inclinação da rampa. Faz-se o registo dos espaços e das velocidades percorridas. Faz-se o cálculo da potência mecânica debitada pelo motor eléctrico em função das diferentes factores de ciclo de trabalho do motor. Pode medir-se a potência eléctrica consumida e calcular o rendimento electromecânico do motor de tracção.
|
| B)- Experiências "SUBA CIRCULANDO" E12- SUBA CIRCULANDO O SUBA é programado para desenhar "oitos" ou seguir uma dada trajectória, em chão plano. Através do sistema de telemetria digital por rádio instalado no SUBA, este transmite as acelerações tridimensionais (ax, ay, az) para um computador pessoal onde são escritas num ficheiro de EXCEL. Os alunos calculam as trajectórias e acelerações previstas e comparam com as trajectórias e acelerações obtidas experimentalmente. |
ROLANDO NO SUBÓDROMO
EXPERIÊNCIAS COM ROLOS NO SUBÓDROMO?
O Prof. Moisés Piedade criou um sistema de rolos coaxiais que podem ser usados no subódromo em ensaios de Momentos de Inércia.

Fig.1- Rolos, rodas terminais , porcas e parafusos.
No Subódromo pode testar-se a descida de rolos deslizando sem atrito, rolando ou
rolando dentro de outro rolo. O objectivo das experiências é determinar as
equações do movimento e fazer experiências usando o equipamento de medida do
Subódromo.
Pode ir pensando nas respostas para:
Desce mais rapidamente o rolo mais pesado ou o mais leve?
Desce mais rápido um rolo que rode dentro de outro ou que esteja fixado a este?
Na descida do subódromo a energia potencial de um rolo é convertida em energia cinética assumindo esta duas formas: energia cinética de translação e de rotação. A primeira depende da massa do objecto e da velocidade adquirida, a segunda depende do momento d inércia do rolo e da sua velocidade angular de rotação.
Nesta experiência podem testar-se várias combinações de movimentos.
MOMENTOS DE INÉRCIA
O Momento de Inércia de um
objecto, em torno de um eixo de rotação, é uma quantidade aditiva, composta pela
soma (ou integração) das contribuições dos vários componentes que constituem o
objecto.
Os objectos a utilizar neste trabalho são cilindros ocos ou maciços, porcas,
anilhas, e composições destes. O momento de inércia em torno do eixo de rotação
comum a todos os objectos - o eixo longitudinal do cilindro exterior, por ex. -
tem apenas três formas possíveis: cilindro maciço, cilindro oco e porcas.
cilindro maciço (parafuso
interior): em que M é a massa do parafuso (sem a porca a ele ligada), e R
é aproximadamente o raio médio da secção circular transversal do parafuso.

cilindro oco (quase todos os
outros objectos, com excepção das porcas): , em que M é a massa do cilindro oco,
Rext e Rint são respectivamente os raios exterior e
interior da secção transversal do cilindro.

porcas (hexagonais): , em que M é
a massa da porca, R é o raio interior médio da secção transversal da porca, A é
metade do tamanho de uma aresta, e L é metade do diâmetro exterior mínimo da
secção transversal da porca.

Os dados relativos aos cilindros e seus componentes são os seguintes (os diâmetros dizem respeito às secções transversais dos objectos, e nalguns casos referem-se a valores médios):
| Objectos |
Diâmetros
|
Comprimento (mm) |
Massa (kg)
|
|
|
interior (mm)
|
exterior (mm)
|
|||
| Parafuso interior (&) |
0
|
5,50
|
202,0
|
0,036 kg
|
| Rodas exteriores (*) |
6,00
|
41,40~48,9
|
1,5+3,0
|
0,0124 kg
|
| Roda exterior peqª. |
11,02
|
26,10
|
3,91
|
0,0021 kg
|
| Porcas pequenas |
5,50
|
10,0-11,50
|
4,0
|
0,0021 kg
|
| Cilindro exterior 1 |
41,40
|
45,40
|
180,0
|
0,1125 kg
|
| Cilindro exterior 2 |
41,40
|
45,40
|
184,0
|
0,115 kg
|
| Cilindro exterior 3 |
41,40
|
45,40
|
188,0
|
0,118 kg
|
| Cilindro interior 1 |
36,50
|
40,00
|
168,5
|
0,315 kg
|
| Tampas (*) |
5,50
|
36,50
|
10,0
|
2x0,013 kg
|
| Cilindro interior 2 |
26,85
|
33,45
|
170,0
|
0,420 kg
|
| Tampas (*) |
5,50
|
26,85
|
10,0
|
2x0,0075 kg
|
| Cilindro interior 3 |
22,00
|
27,50
|
170,0
|
0,280 kg
|
| Tampas (*) |
5,50
|
22,00
|
10,0
|
2x0,0047 kg
|
| Cilindro enroscado |
5,50
|
15,00
|
170,0
|
0,180 kg
|
| Porcas grandes |
14,62
|
23,80-27,78
|
12,55
|
0,0296 kg
|
| Anilhas |
17,20
|
29,70
|
2,85
|
0,010 kg
|

Fig.2- Rolando no Subódromo.
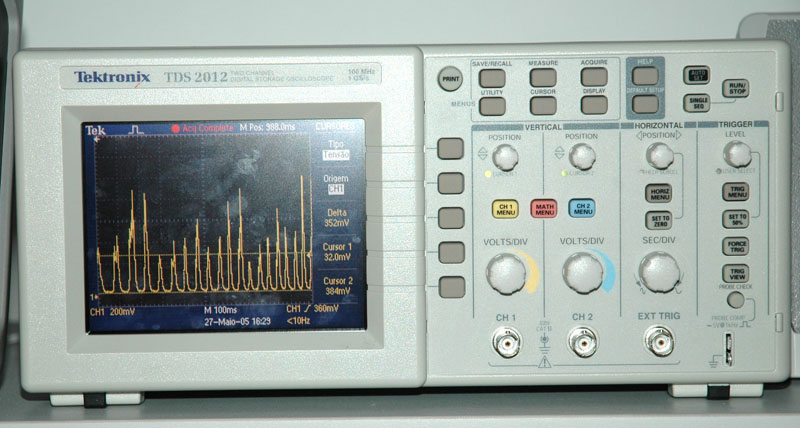
Fig.3- Impulsos obtidos nos 25 sensores do subódromo pela passagem do rolo.

Fig.4- Enquanto os alunos fazem cálculos o Prof. Pedro Abreu filma os trabalhos´(2005).